

While wandering around the web looking for interesting mechanisms, I stumbled upon, for the gazillionth time, Geneva mechanisms. Even though I had looked at Geneva mechanisms more times than I can count, this time I discovered something interesting; A Geneva mechanism can be built without the anti-slip disk. The anti-slip part of the mechanism keeps the output from rotating when there is no pin in a slot. A paper I found shows a mechanism with enough pins that when one exits a slot, another is entering. This means the amount of time the mechanism stops between pin movements is zero. But in a strange twist of physics, the mechanism still stops intermittently, just for what is theoretically a zero amount of time.

This led me to wonder how someone goes about simulating this type of mechanism. Well, there are lots of equations on lots of web sites that show accelerations and speed but none that show a simple way to calculate the angle of rotation of the output for any given angle of the input. This angle would of course include multiple rotations. I wondered if I could apply the usual kludge method of simulation and just calculate angles and stuff. Sure enough, it wasn’t too hard.
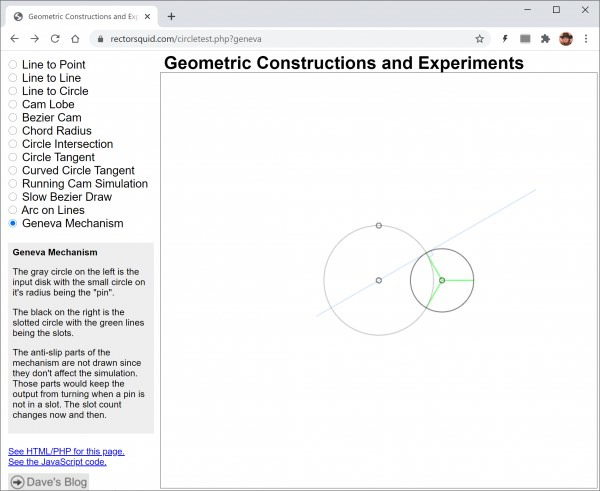
You can find the simulation here on my Geometric Constructions page
And here is a link to the paper that mentions the four-pin mechanism that needs no anti-slip components: